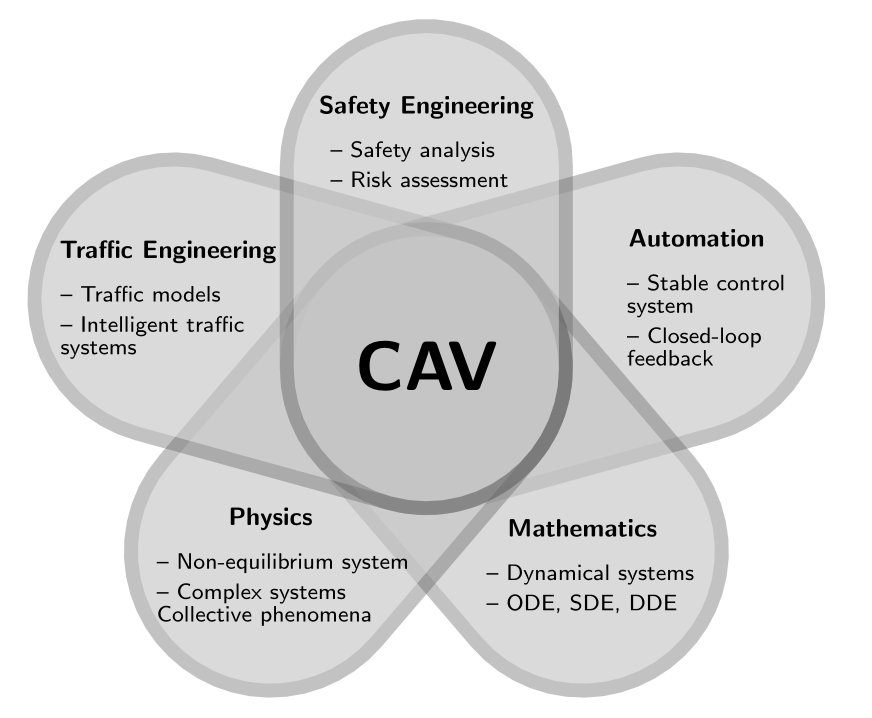
Traffic flow modeling & driving automation
The topic relies on the modeling of road vehicle motions using interacting particle systems. Traffic flow are dynamical systems of self-driven agents interacting locally with partial knowledge of the environment. They are complex as the system performances can not be directly deduced from the individual behaviors of the agents. The agent systems describe non-linear phenomena and phase transitions to self-organized collective dynamics, e.g., lane formation or stop-and-go waves upon other coordinated phenomena.
The modelling approach is bottom-up multi-scale: from microscopic interaction behaviors to macroscopic collective performances. It includes experiment-based modelling and simulation, and model calibration using real data. Collective dynamics are tackled theoretically by stability analysis and, for models based on stochastic processes, calculation of invariant measures, or limit passages to infinite systems. Applications rely on the conception and evaluation of intelligent transportation systems and the devising of safe and reliable motion planners for automated and connected vehicles.
Simulation modules
Car-following models and ACC systems with periodic boundaries
UDDS urban driving cycle test procedure
Experiment with ACC equipped vehicles by Gunter et al.
Experiment with the CAT-vehicle by Stern et al.
European Open ACC experiment with ACC equipped vehicles
Classical stability VS Overdamped stability
Simulating the Braess paradox
Cellular automata traffic models
Cell Transmission Model



")